ABOUT

I am a Mechanical Engineering Master’s student at Columbia University. Prior to matriculation, I co-founded and ran a design and fabrication studio in NYC for six years, working with clients including Tiffany & Co., Hermes, and the Lourve Museum in Paris. I have 10 years of experience as a tig welder and machinist, and I enjoy collecting elements for my periodic table.
PROJECTS
BIPEDAL ROBOT
Mechanical Design & Prototyping Process
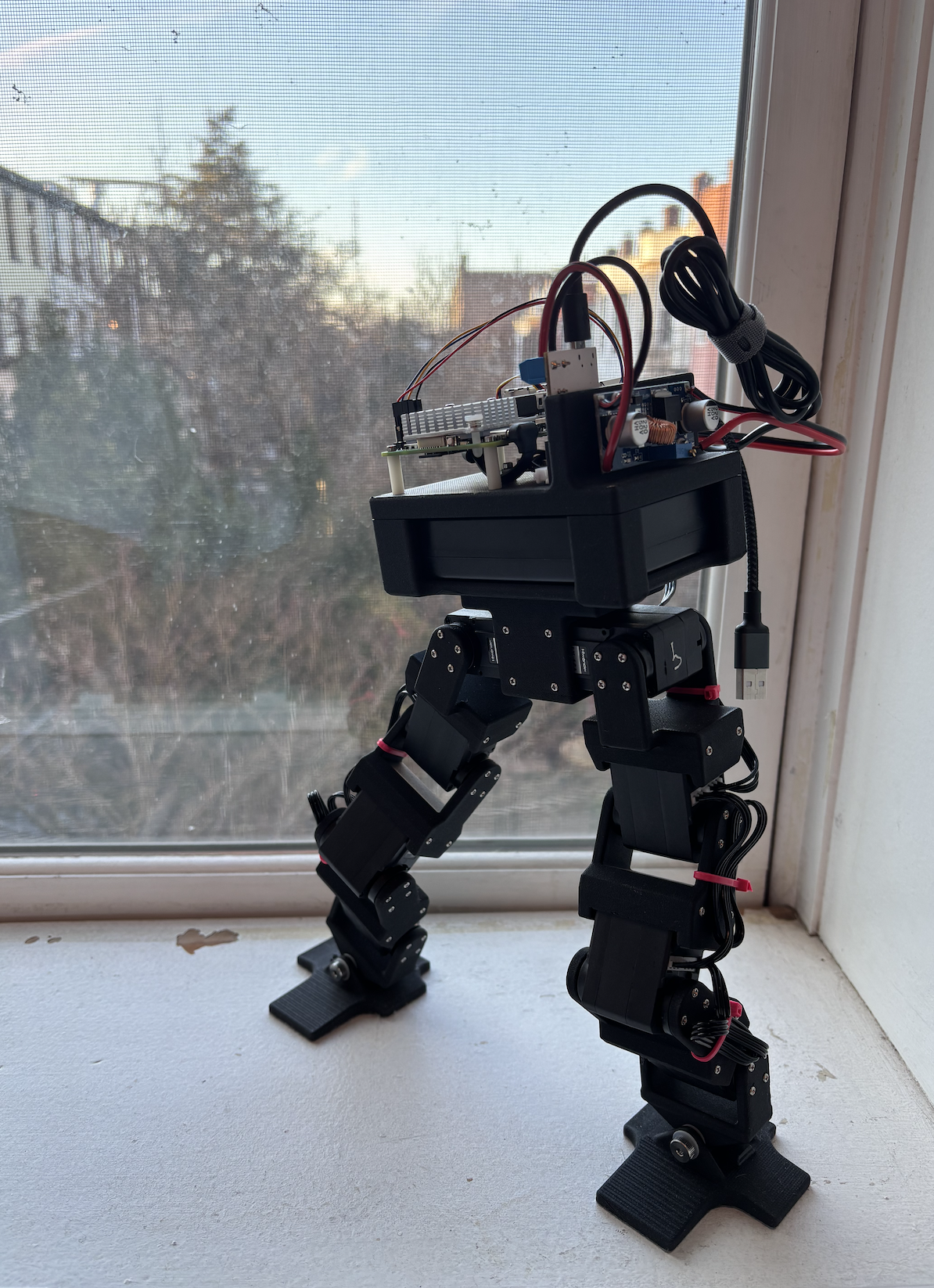
Given fixed design constraints: eight servo motors, a DC power converter, battery, IMU, and a Raspberry Pi, I was tasked with designing a robot capable of stable walking.
I began with concept sketches to explore feasible leg designs and motor placement within the required hardware parameters. Through multiple design iterations, I refined the robot to balance stability, range of motion, and manufacturability.
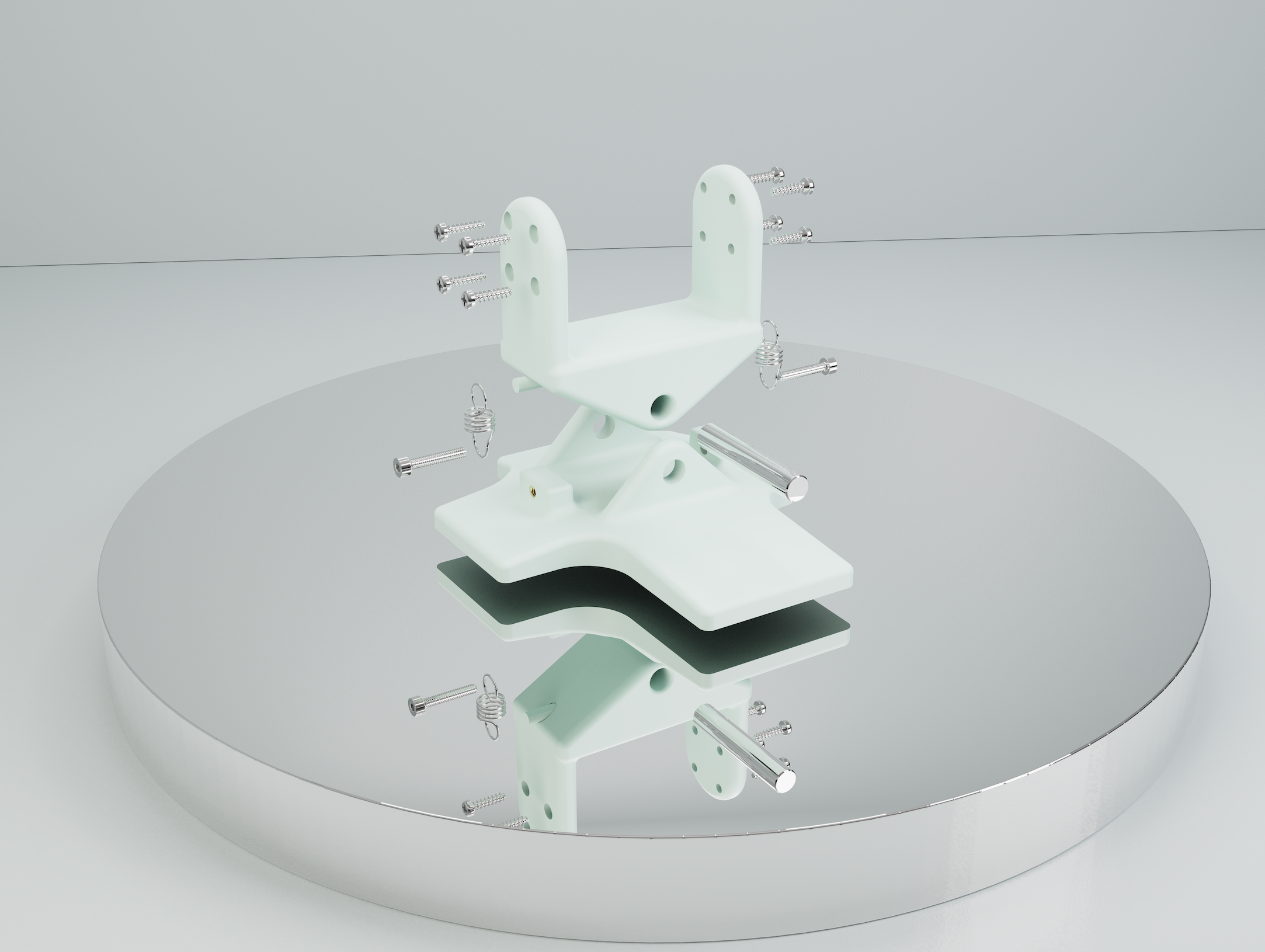
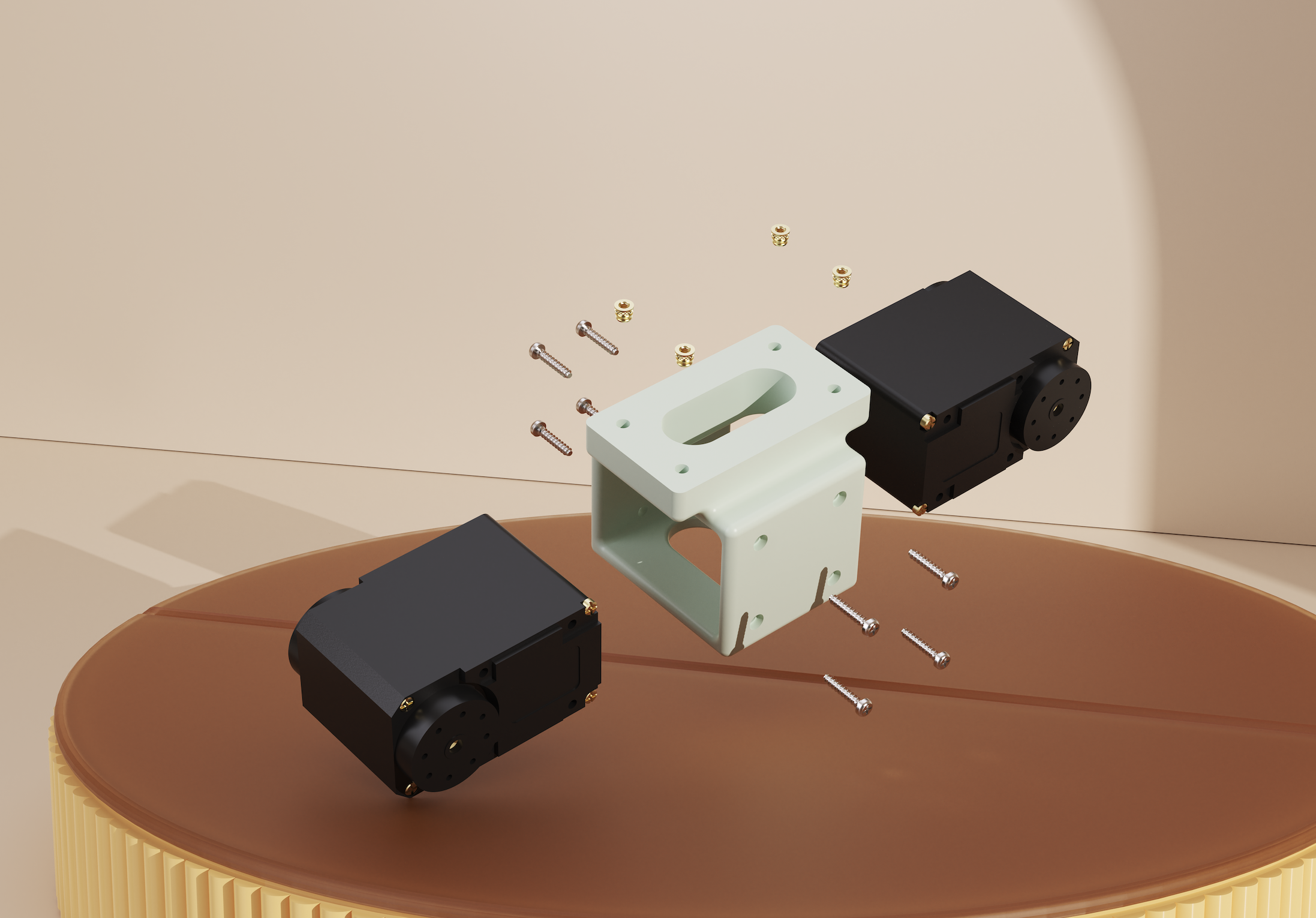
The final design was modeled in SolidWorks and rendered in KeyShot. I prototyped joint mechanisms and leg motion early to evaluate collision risks, range limits, and assembly tolerances.
After validating joint motion and clearances, I 3D printed both a functional prototype and a final hardware revision, resulting in a modular structure suitable for dynamic walking and reinforcement learning control.

DEEP REINFORCEMENT LEARNING
I developed a custom OpenAI Gymnasium environment using MuJoCo physics to train an autonomous walking controller via deep reinforcement learning.
The control policy was trained using Proximal Policy Optimization with curriculum learning across three stages: standing stability, forward walking, and dynamic gait optimization. To prevent destabilization during early training, I used progressive torque scaling, gradually increasing actuation limits from 30% to full torque. The reward function was designed to balance forward velocity, stability, and gait symmetry.
The final system used a 45 dimensional observation space incorporating IMU data, joint states, contact sensors, and gait phase information.
Training was performed using StableBaselines3. The resulting policy achieved a sustained walking speed of 30 cm/s, traveling an average of 2.8 meters per episode. The learned behavior exhibited a natural alternating bipedal gait.

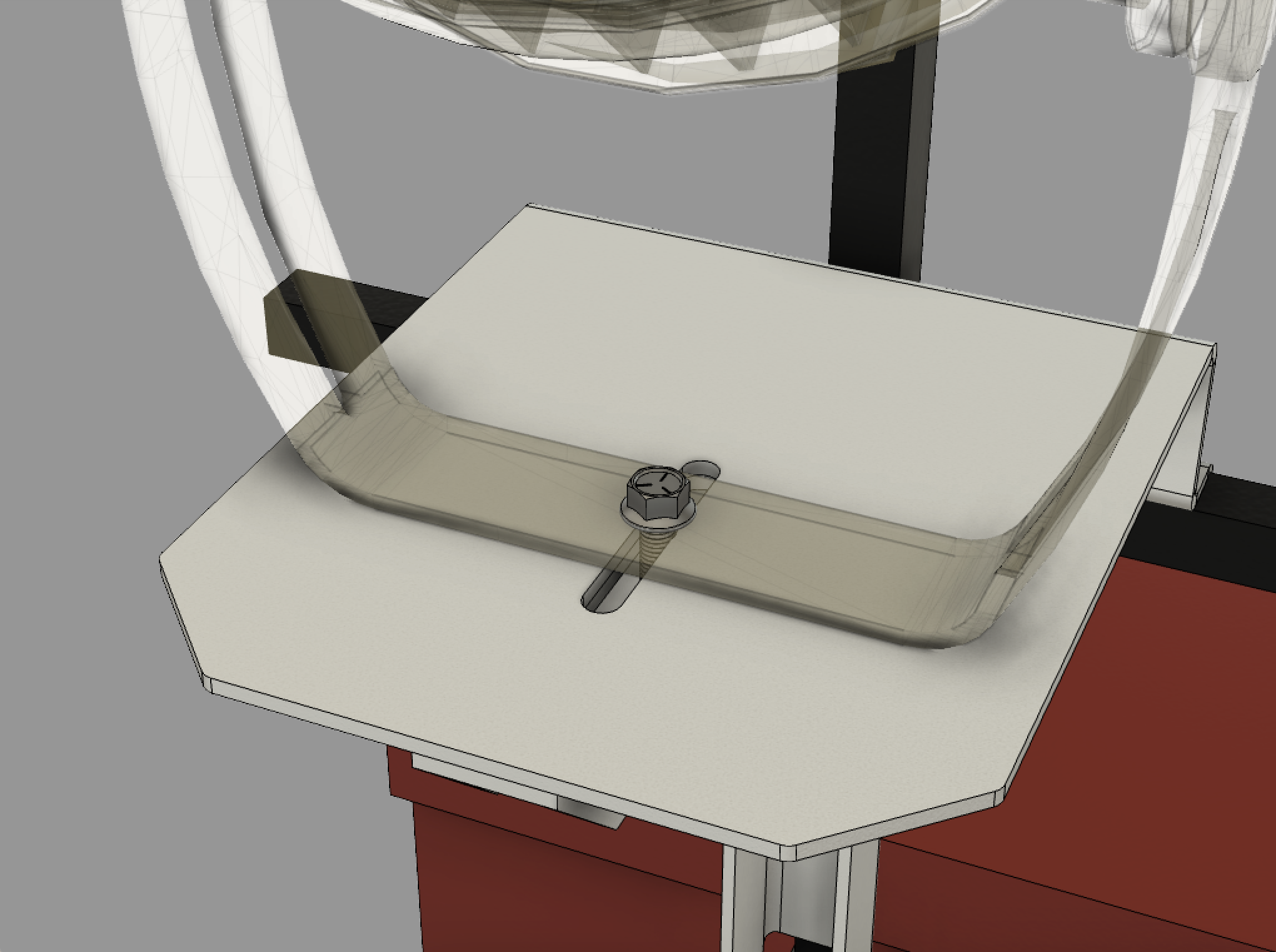
LIGHTING BRACKETS
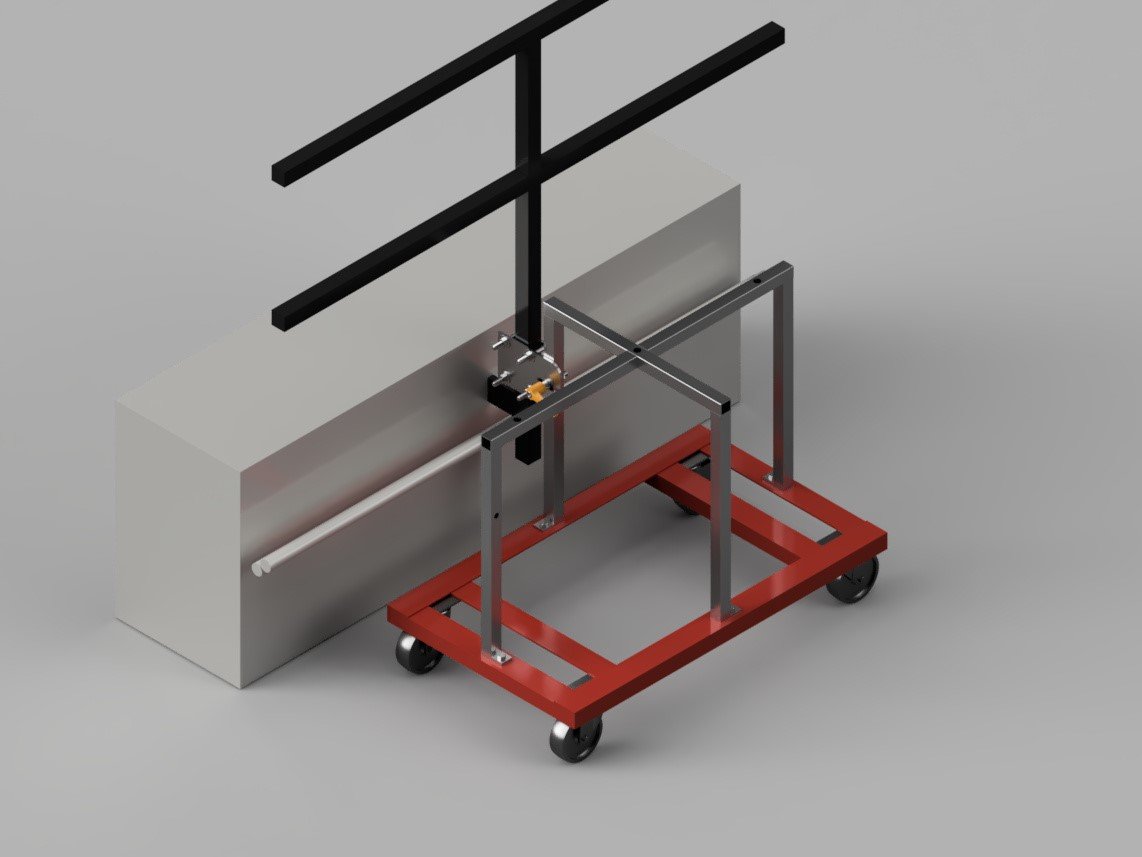
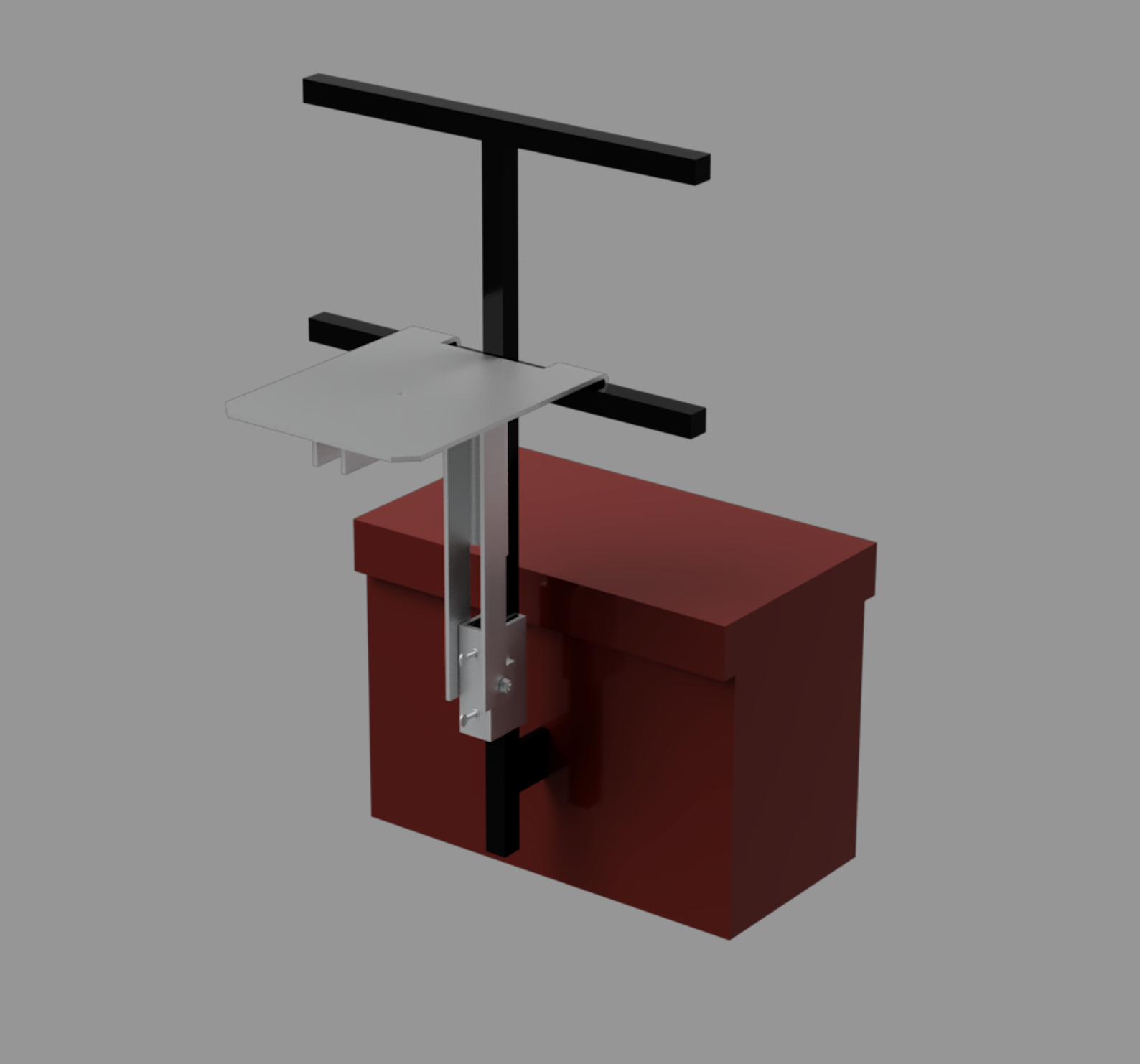
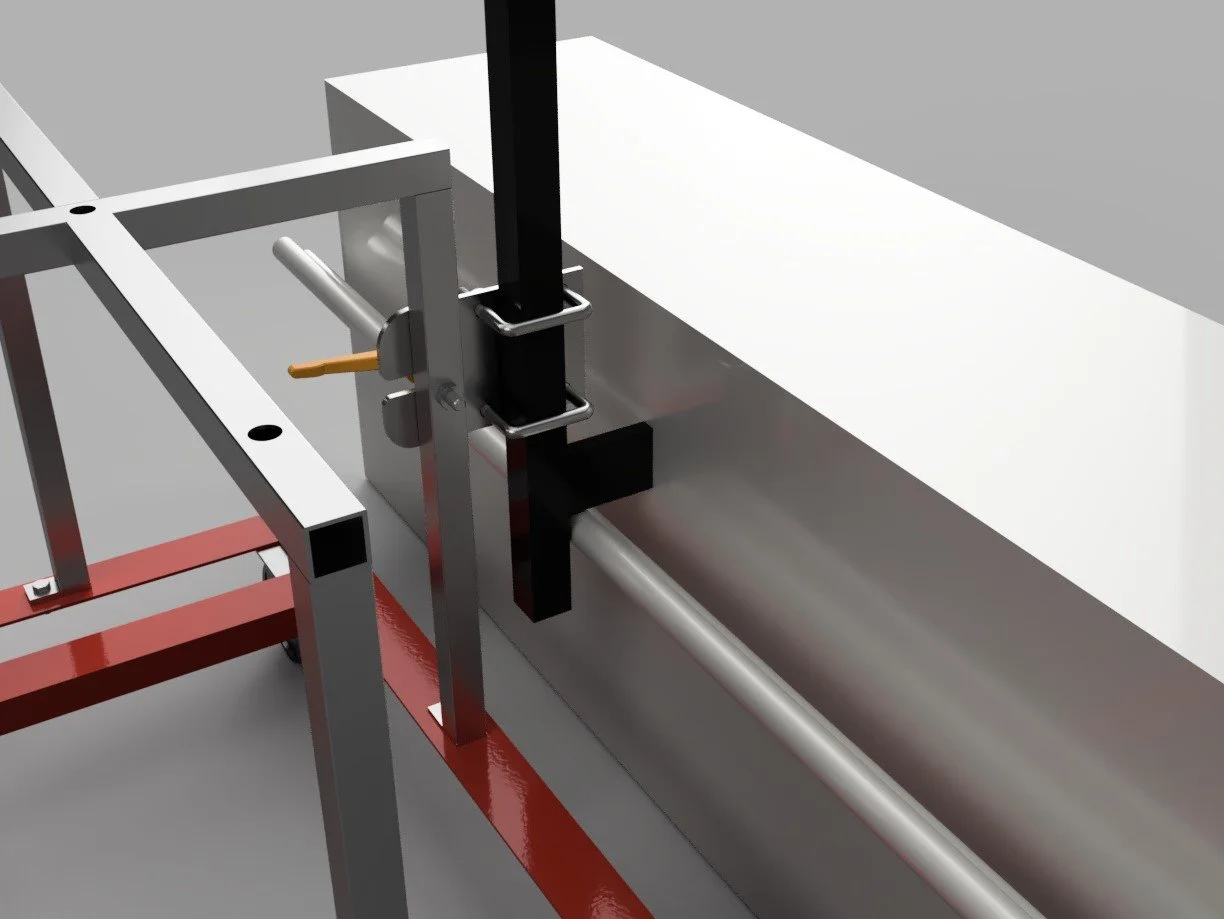
Lighting bracket dollies designed and fabricated to hold Lumenpulse spot lights to provide decorative uplighting on a times square building rooftop in NYC.
The design accounted for rooftop conditions, aiming requirements of the lights, and ease of installation and maintenance. Each bracket was engineered to ensure stability, repeatable alignment, and long term durability in an exposed environment, supporting consistent illumination of the building.




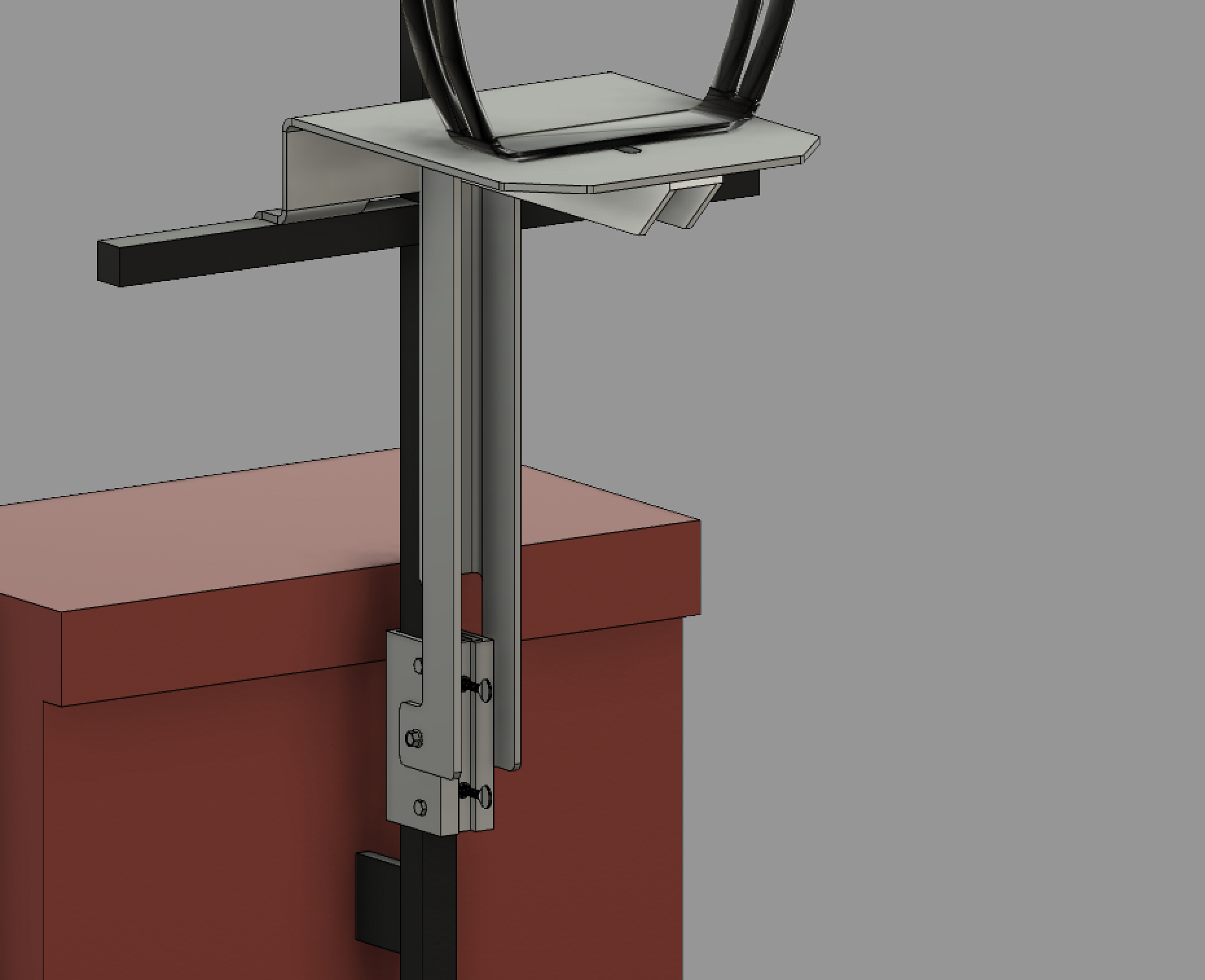
DESIGN AND PROTOTYPING
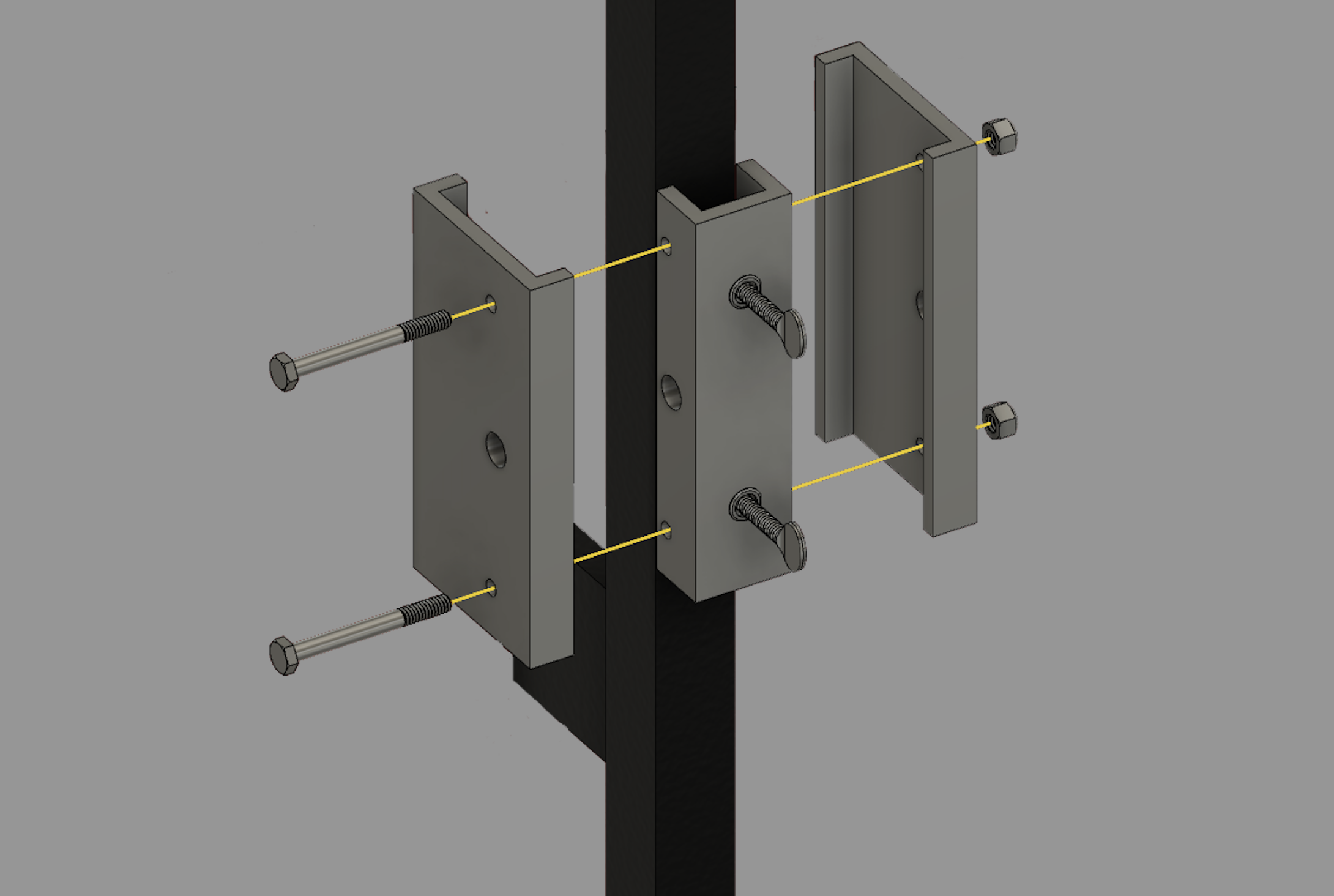
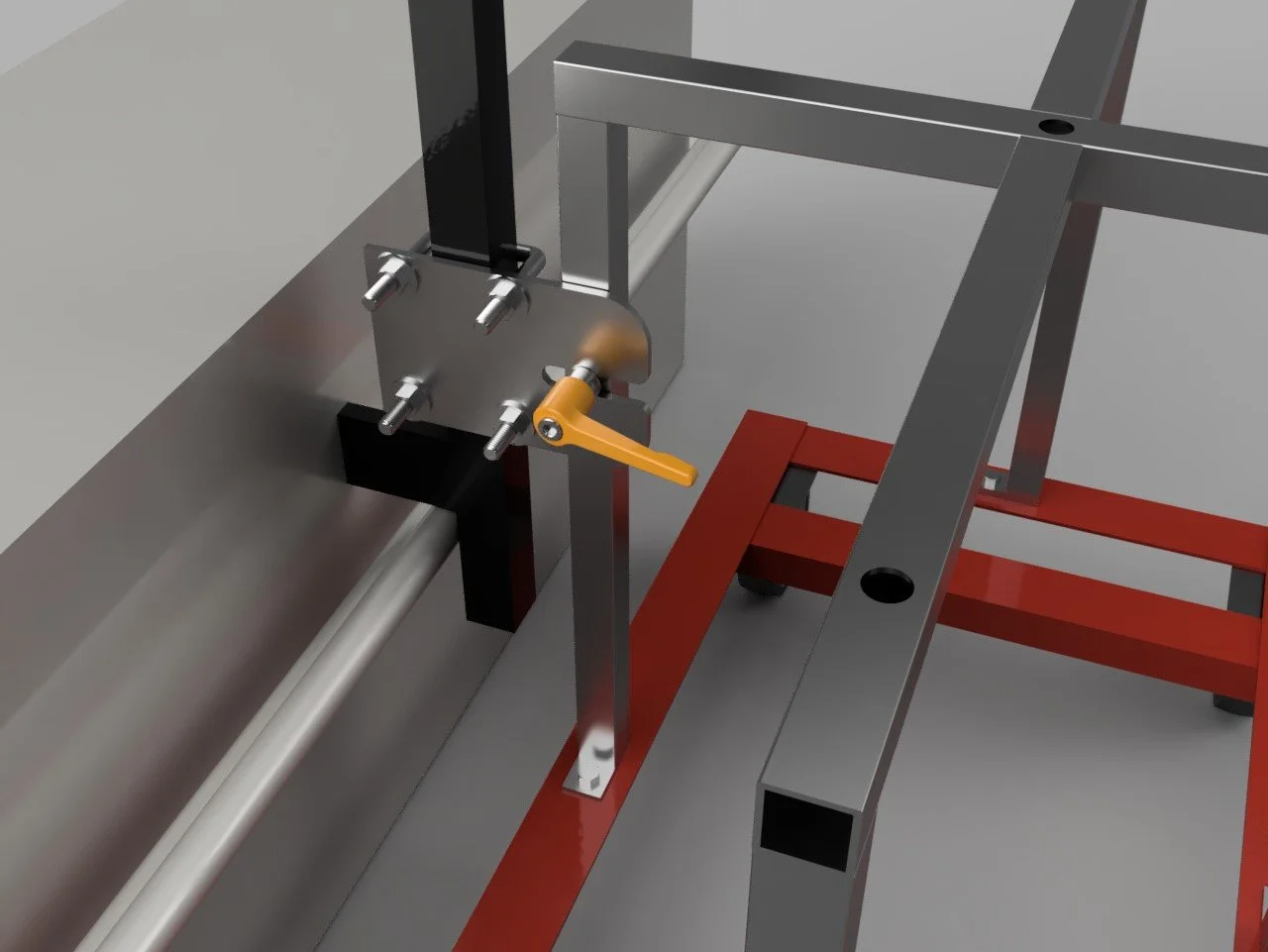
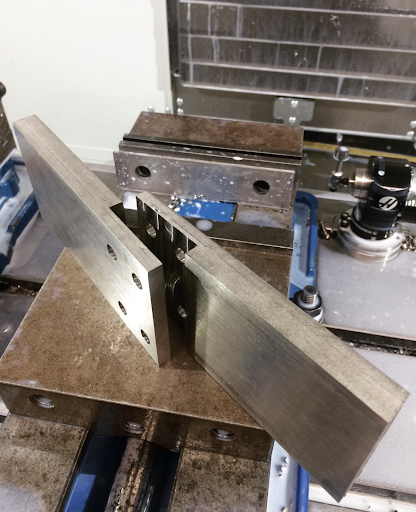
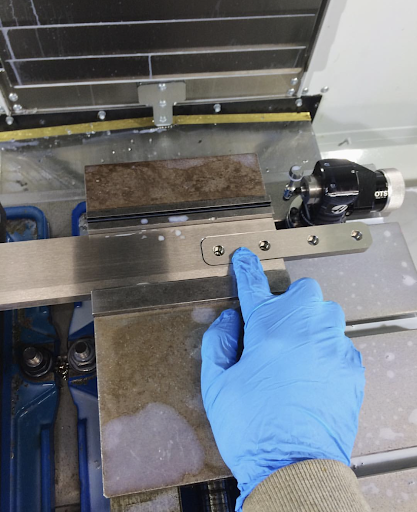
These brackets were designed to keep in mind that the spotlight would need to be fully mobile, but sturdy enough when attached in place to not move or become a hazard in inclement weather. We chose 6061 aluminum for the frame, a powder coated dolly, and stainless steel hardware all around. We used dielectric grease and rubber pads at all stainless steel to aluminum connection points to prevent galvanic corrosion.
U-bolt attachment system used for adaptive mounting to accommodate guardrail degree variations from plumb, identified through comprehensive site surveys.








HAND RAILINGS
Hand railing assemblies fabricated with 304 stainless steel bar stock. All joining hardware was cnc machined for a non welding on site installation. Pieces are finished in a black oxide patina.

DESIGN & FABRICATION




The miniature Lobmeyr chandeliers were fitted to be fully functional and capable of continuous rotation at variable speeds controlled via a mounted switch.
To enable infinite rotation without wire interference, we integrated a hollow slip-ring rotary assembly. This design allowed the chandelier to be wired through a rotating subassembly while maintaining a fixed electrical hub for the main power connection, ensuring reliable power delivery during continuous motion.
CONTACT